ブログBLOG

【タイトル】「歩くのが遅い=筋力低下」は間違い?効率的な歩行の鍵を握る「重心」と「姿勢」の意外な真実
1. イントロダクション:あなたは「自分の骨格」と戦っていませんか?
「最近、歩くスピードが落ちてきた」「もっと颯爽と歩きたいのに、足取りが重い……」
こうした悩みに対し、多くの人が「加齢による筋力不足」を疑い、スクワットに励んだりウォーキングの距離を延ばしたりします。しかし、バイオメカニクス(生体構造力学)の視点から見れば、それは「ブレーキを引きずりながらエンジンの出力を上げようとする」ような非効率な行為かもしれません。
歩行スピードを決定づけるのは、単なる筋肉の強さではありません。実は、**「姿勢と重心の関係」**という物理学的な条件が整っているかどうかが、すべての鍵を握っています。もしあなたが一生懸命歩こうとして疲弊しているなら、それは筋力の問題ではなく、自分の骨格の並び(アライメント)と戦っている可能性があるのです。
2. 専門家が教える「重心」の正体:足裏の感覚は「重心」ではない
まず、多くの人が陥る決定的な誤解を解く必要があります。あなたは「足の裏で最も重みを感じる場所」を重心だと思っていませんか?
専門的な定義では、それは**足圧中心(COP:床反力作用点)**と呼ばれ、重心そのものではありません。
-
重心(COG:質量中心): 身体の各パーツの質量が集中する「計算上の点」です。人体を精密に分析すると、重心は以下の2つの要素から導き出されます。
- 上半身の質量中心: およそ胸椎7番〜9番(T7–T9)、肩甲骨の間あたりの高さ。
- 下半身の質量中心: およそ太ももの真ん中より少し上。
- この2つの中間地点として計算される全体の**重心(COG)は、成人の場合、およそ第2仙椎(おへその下、いわゆる丹田)**の奥に位置します。
メディアで語られる「4スタンス理論」などの重心タイプ論は、実はこの**足圧中心(COP)**の位置を分類しているに過ぎません。それは生まれ持った特性ではなく、その時の「姿勢」の結果として現れている現象なのです。足裏の感覚だけに頼るのではなく、体内の質量中心をどう扱うかが、歩行を解き明かす第一歩となります。
3. 「猫背(スウェーバック)」が加速を殺す物理学的な理由
悪い姿勢の代表格である「スウェーバック(いわゆる猫背)」は、物理学的に見て「最も歩きにくい姿勢」と言えます。なぜなら、推進力を生むための**「レバー(梃子)」**が機能しなくなるからです。
歩行時の推進力は、重心(COG)と足圧中心(COP)の水平距離によって決まります。この距離が遠ければ遠いほど、地面を蹴った際のエネルギーが効率よく前進のための加速度に変換されます。
しかし、スウェーバック姿勢では、上半身の質量中心(T7–T9)が後方に崩れます。すると、身体の総重心も後ろへ移動し、接地している足(COP)の真上に重心が重なってしまいます。
- 物理的帰結: 重心と足圧中心の距離が近づくことで、加速のためのレバーアームが消失します。
- 感覚的結果: いくら地面を強く蹴っても「のれんに腕押し」状態で、推進力が生まれません。これが「頑張っているのに体が重い」と感じる正体です。
4. 「ミリタリーバック」の罠:それは制御不能な「転倒」である
反対に、極端に胸を張り、上半身を前に突き出した姿勢を「ミリタリーバック」と呼びます。お笑い芸人のオードリー・春日さんのようなポーズをイメージしてください。
この姿勢は、上半身の質量中心を前方に置くため、重心と足圧中心の距離が強制的に広がります。その結果、推進力(加速度)は劇的に高まり、驚くほど速く歩くことができます。しかし、ここには大きな罠があります。
この状態は、効率的な歩行というより、**「前に転ぼうとする力」を止められず、足が勝手に出続けている「制御不能な転倒」**に近いのです。
- デメリット: ゆっくり歩くことが困難になり、動作の微調整が効きません。
- 身体負荷: 静止しているだけで特定の筋肉に過剰な負担がかかり、急な方向転換などの「動的な柔軟性」が失われます。
5. 筋トレよりも優先すべき「物理的効率」:ニュートラル・ポジション
「歩くのが遅いから筋トレをする」という安易なアプローチは、バイオメカニクスの観点からは推奨されません。姿勢が崩れたまま鍛えるのは、先述した通りブレーキをかけたままアクセルを踏むようなもので、関節への負担を増やすだけだからです。
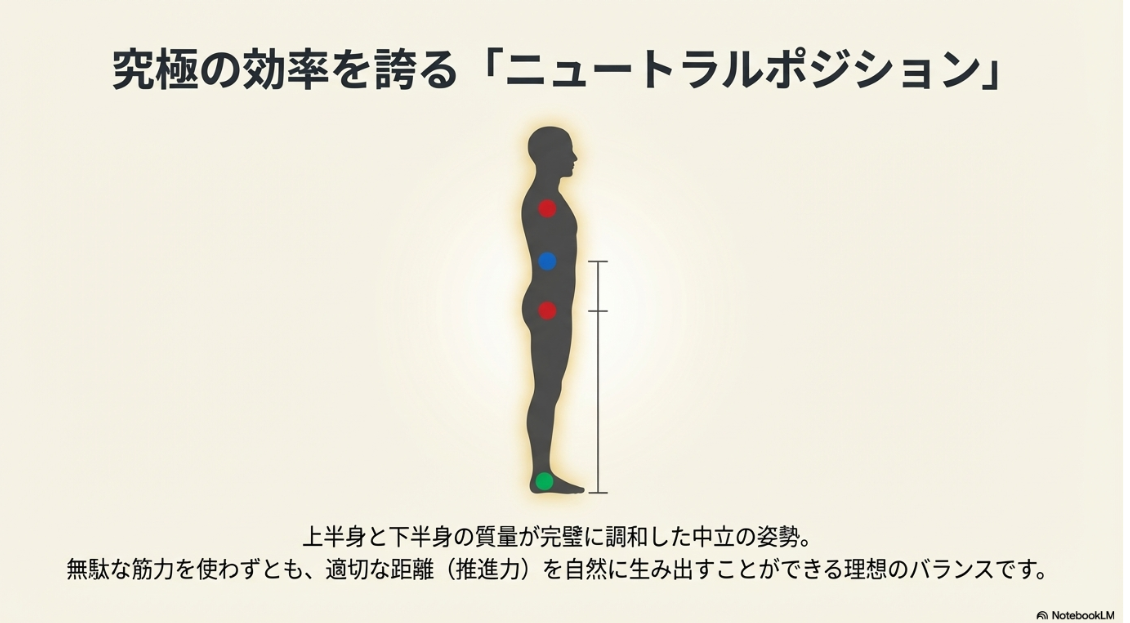
最優先すべきは、身体を**「ニュートラル・ポジション(中立姿勢)」**に戻し、**力学的優位性(Biomechanical Advantage)**を確保することです。
- 車の「ニュートラルギア」の比喩: ギアがニュートラルであれば、前進にも後退にも、どの方向にも即座に切り替えられます。
- 身体におけるメリット: ニュートラル・ポジションは、重力に対して骨格が最も安定して積み上がっている状態です。余計な筋力を使わずに立つことができ、歩き出しの瞬間、最小限のエネルギーで重心を加速させることが可能になります。
「キネティック・チェーン(運動連鎖)」が正しく機能し、全身が連動して動くためには、まずこの中立な地点を確保することが不可欠なのです。
6. 結論:歩行のパラダイムシフト「歩くとは、制御された転落である」
歩行の質を劇的に変えるためのパラダイムシフト、それは**「歩行とは、意図的に重心を前方に崩し、それを足で受け止める『制御された転落』の連続である」**と理解することです。
筋力で地面を力任せに押すのではなく、自分の姿勢を整えて「重心」を適切な位置に配置すれば、重力が勝手にあなたを前へと運んでくれます。歩行の質は、筋力の多寡よりも、この物理法則をどれだけ味方につけられるかで決まるのです。
あなたは今日、無駄な筋力を使って、自分の身体と喧嘩しながら歩いていませんか?
まずは一度立ち止まり、肩甲骨の間(T7-T9)と、お腹の奥(S2)に意識を向けてみてください。自分の「重心」がどこにあるかを感じ取ることができたとき、あなたの歩行は、もっと軽く、もっと自由なものへと変わるはずです。